

箱涵管道清淤机器人
-
 阿尔法
阿尔法 
- 评论(1)
用户小分类 清淤机器人
分享 4
详情内容
CONTENT DETAILS
防爆隔爆防水------阿尔法清淤机器人市政管涵清淤好帮手
该设备由水下作业端、工作站(动力机柜、控制机柜、)后处理端、管线组成。动力机组为整个新系统提供所需的动力支持,由发电机、液压站组成;控制机柜监测和控制整体系统的运行(可实现遥控或者5G远程智能检测和控制);工作前端由履带车底盘搭载工作部件。根据介质的不同选择不同的提取方式和辅助工具,提取方式分为:自吸、气提、泵送、推送、铰龙等多种模式,辅助工具分为搅吸头、绞龙旋耕、绞龙破碎搅吸头、张合划拨臂、铲斗叉斗、滚筒式毛刷、高压水喷头等,以及照明视讯设备。工作后端主要是预处理前端提取出来的介质,实现干湿分离或者垃圾缩量目标;管线由控制线缆和传送管道组成,传导信号和介质。
阿尔法清淤机器人实现了有限空间作业“系统(泵)不停运、人员不下井、污泥不落地、泥砂水分离”的 、生态、环保的清淤固化目标,解决了市政管道清淤施工的难题。
箱涵\沉淀池\储物罐潜入式清淤清洗机器人


设备由动力机柜、控制机柜、工作前端、后处理端、管线组成。动力机组为整个新系统提供所需的动力支持,由发电机、液压站组成;控制机柜监测和控制整体系统的运行;工作前端由履带车底盘搭载工作部件。根据介质的不同选择不同的提取方式和辅助工具,提取方式分为:气提、泵送、铰龙三种模式,辅助工具分为搅吸头、绞龙旋耕、绞龙破碎搅吸头、张合划拨臂、转头铲斗、滚筒式毛刷、高压水喷头等以及照明视讯设备;工作后端主要是预处理前端提取出来的介质,实现干湿分离或者垃圾缩量目标;管线由控制线缆和传送管道组成,传导信号和介质。
2、性能参数(定制化产品,要依据需求进行设计计算)
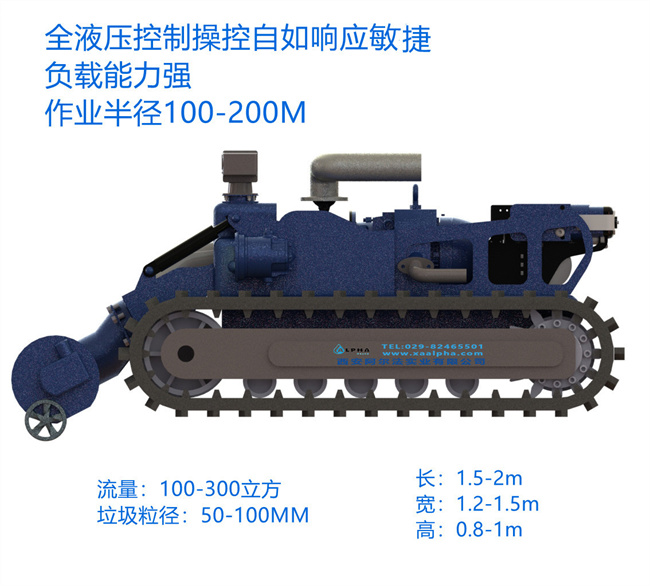
通过性:非常规履带式驱动机构(、特开发),具有的通过性能;
高等级防护:防护等级IP68,水下10米,符合、防爆设计要求;水下采用全液压驱动系统,控制信号直流电压小于12V。
搭载平台:标配搭载电视摄像系统,选配搭载声纳系统、树根切割机、打磨铣头、高压冲洗头等辅助工具;
变形设计:针对不同管径,设备可以人工或者自动适应;
防腐蚀;车身主要部件采用不锈钢设计,可以适应污水等腐蚀性水质;
作业端体积:依照出入口大小定制
流量;20立方-200立方可选
扬程:10-20M
有效传送距离:大于100M
垃圾传送粒径::5CM
行走速度1-3KM/H
3、应用场景
沉淀池、过滤池、工业罐体、污水处理厂、池塘、湖泊、河道、护城河、大口径雨污管道清淤疏浚
4、产品部件优点(根据使用环境选装):
耐冲击铲斗绞龙:铲斗将淤泥集中到铲斗内,绞龙对淤泥进行搅拌破碎,具有良好的耐冲击性,能对淤泥快速有效地进行处理。
率渣浆泵(原油泵):功率15.5kw,扬程25m,水平传输距离50m,流量100m³/h,泵送.大颗粒直径25mm, 节能。
全液压驱动:机器人采用全液压驱动力大,驱动刚度大、精度高、响应快;调速范围宽,速度控制方式多样;易于实现 保护,使用寿命长。
全方位观测:采用4个200w像素专业水下摄像机,观测范围广,多方位观测;同时装配4个50w高亮LED水下照明灯,能清晰有效地观测到机器人的工作周围的情况,有效辅助决策。
全自动卷缆机:采用全自动卷缆机,运行稳定,性能可靠,提高劳动效率, 了工人劳动强度,实用性强。同时解决了电缆摆放混乱问题,提高了工作场地利用率,改善了作业环境,便于使用和管理
该设备由水下作业端、工作站(动力机柜、控制机柜、)后处理端、管线组成。动力机组为整个新系统提供所需的动力支持,由发电机、液压站组成;控制机柜监测和控制整体系统的运行(可实现遥控或者5G远程智能检测和控制);工作前端由履带车底盘搭载工作部件。根据介质的不同选择不同的提取方式和辅助工具,提取方式分为:自吸、气提、泵送、推送、铰龙等多种模式,辅助工具分为搅吸头、绞龙旋耕、绞龙破碎搅吸头、张合划拨臂、铲斗叉斗、滚筒式毛刷、高压水喷头等,以及照明视讯设备。工作后端主要是预处理前端提取出来的介质,实现干湿分离或者垃圾缩量目标;管线由控制线缆和传送管道组成,传导信号和介质。
阿尔法清淤机器人实现了有限空间作业“系统(泵)不停运、人员不下井、污泥不落地、泥砂水分离”的 、生态、环保的清淤固化目标,解决了市政管道清淤施工的难题。
箱涵\沉淀池\储物罐潜入式清淤清洗机器人
设备由动力机柜、控制机柜、工作前端、后处理端、管线组成。动力机组为整个新系统提供所需的动力支持,由发电机、液压站组成;控制机柜监测和控制整体系统的运行;工作前端由履带车底盘搭载工作部件。根据介质的不同选择不同的提取方式和辅助工具,提取方式分为:气提、泵送、铰龙三种模式,辅助工具分为搅吸头、绞龙旋耕、绞龙破碎搅吸头、张合划拨臂、转头铲斗、滚筒式毛刷、高压水喷头等以及照明视讯设备;工作后端主要是预处理前端提取出来的介质,实现干湿分离或者垃圾缩量目标;管线由控制线缆和传送管道组成,传导信号和介质。
2、性能参数(定制化产品,要依据需求进行设计计算)
通过性:非常规履带式驱动机构(、特开发),具有的通过性能;
高等级防护:防护等级IP68,水下10米,符合、防爆设计要求;水下采用全液压驱动系统,控制信号直流电压小于12V。
搭载平台:标配搭载电视摄像系统,选配搭载声纳系统、树根切割机、打磨铣头、高压冲洗头等辅助工具;
变形设计:针对不同管径,设备可以人工或者自动适应;
防腐蚀;车身主要部件采用不锈钢设计,可以适应污水等腐蚀性水质;
作业端体积:依照出入口大小定制
流量;20立方-200立方可选
扬程:10-20M
有效传送距离:大于100M
垃圾传送粒径::5CM
行走速度1-3KM/H
3、应用场景
沉淀池、过滤池、工业罐体、污水处理厂、池塘、湖泊、河道、护城河、大口径雨污管道清淤疏浚
4、产品部件优点(根据使用环境选装):
耐冲击铲斗绞龙:铲斗将淤泥集中到铲斗内,绞龙对淤泥进行搅拌破碎,具有良好的耐冲击性,能对淤泥快速有效地进行处理。
率渣浆泵(原油泵):功率15.5kw,扬程25m,水平传输距离50m,流量100m³/h,泵送.大颗粒直径25mm, 节能。
全液压驱动:机器人采用全液压驱动力大,驱动刚度大、精度高、响应快;调速范围宽,速度控制方式多样;易于实现 保护,使用寿命长。
全方位观测:采用4个200w像素专业水下摄像机,观测范围广,多方位观测;同时装配4个50w高亮LED水下照明灯,能清晰有效地观测到机器人的工作周围的情况,有效辅助决策。
全自动卷缆机:采用全自动卷缆机,运行稳定,性能可靠,提高劳动效率, 了工人劳动强度,实用性强。同时解决了电缆摆放混乱问题,提高了工作场地利用率,改善了作业环境,便于使用和管理
| 履带底盘方案 | |
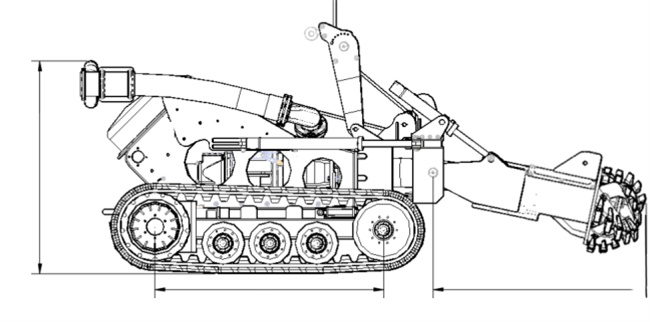
| 机器整体性能 | 整机尺寸为14000*900*600mm(带绞龙装置),搭载渣浆吸除泵、液压控制阀组、电控盒。重量小于300kg |
| 驱动方式 | 全液压驱动 |
| 下潜深度 | 10m |
| 行进速度 | 3-30m/min可调 |
| 机身框架 | 采用不锈钢304材质,可适应恶劣的野外工作环境, 机器工作的稳定性 |
| 爬坡能力 | ≤30° |
| 绞龙 | 有良好的耐冲击性,长度800mm,全液压驱动 |
| 动力液压控制仓 | 6联组合式液压控制集成块,工作压力为18Mpa,主要控制机器人的行进、吸除泵工作绞龙运转的上下 |
| 渣浆泵 | 主要负责将泥沙吸入并排放到指定回收区,排出口75-100mm,流量100m³/h,扬程23m,吸入颗粒50mm |
| 显示器 | 采用LED高亮液晶显示器,亮度不低于800 |
| 水下控制方案 | |
| 控制系统 | 主控制系统操作简单便捷,显示便捷,显示参数包括机器的方位,液压系统控制及参数检测,视频录制与叠加,照明,拍照。 |
| 摄像头 | 机器人配有两台台700线低照度浑水专业相机,照度 0.001lux, 夜视,工作电压为:24V,人为开关 |
| 照明灯 | 50W LED照明灯,电压:24V/1.5A,4500—5000LM,色温4500K,能有效的在浑浊的水域中使用。 |
| 控制基站组成 | |
| 电气控制柜 | 主要用于机器人和控制箱的通电与漏电保护,输入电压380V,输出电压380V和220V。 |
| 控制台 | 水下状况监测显示、机器人姿态控制、工作端作业控制 |
| GPS系统 | 非屏蔽环境通过GPS定位,设置自动运行区间范围,实现自动巡航作业 |
| 收线器 | 收线器为电动式绞盘,.大可收150米电缆。 |
| 主控制电缆 | 电缆外径为32mm,总长100m,电缆外部包有两层承重钢丝铠甲与橡胶保护层, 数据控制、视讯传输、照明供电 |
| 收缆绞盘 | 电动式水管收纳绞盘,收纳带浮漂Ø75水管带100米 |
| 水管 | Ø75PVC胶管 |
| 吊机 | 车载式吊臂220/380V电机,500KG折叠吊臂 伸臂1500 |
| 液压站 | 岸基液压站,通过两根主管与水下作业端控制阀组连接。达到控制1、行走2、升降1、水枪1、绞龙1,共六组的目的, |
| 液压管 | 主管用高压胶管,工作端绞龙用软管,固定不动的目标端(行走、渣浆泵)使用不锈钢油管 |
| 地面站集成车架 | 牵引式,四轮结构、手动刹车,承重1500KG。搭载配电箱、控制台、水下作业端(水下机器人)、液压站总成、线缆绞盘、吊装机、工具箱等集成式组合。 |